




This quarter at the UW we produced some documentation on the development of a DIY inkjet printer. This was partly in response to the fact that there are no DIY inkjet kits available. There was a kit available from Parallax however it is no longer made and the main book that was written to go with it is now out of print.
The goal of this project was to develop a low cost, open source inkjet printer utilizing standard inkjet technology, for personal use. This project was partly in response to the fact that there are no DIY inkjet kits available. There was a kit available from Parallax parallax.com/dl/docs/prod/robo/InkjetKitDocs-v1.0.pdf. This kit is no longer made and the book amazon.com/Inkjet-Applications-Matt-Gilliland/dp/0972015930 that was written to use that kit is now out of print.
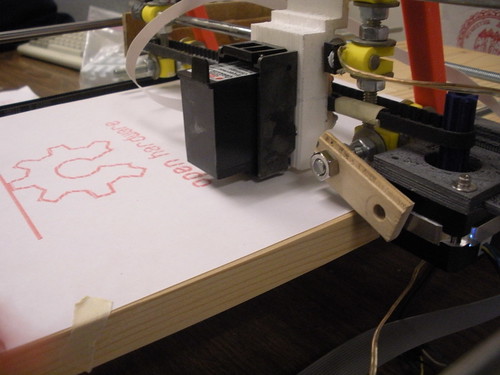
The prototype design used a carriage assembly constructed from steel rods that were assembled using connectors that can be printed on an FDM machine. The entire carriage system is driven along the x-axis by a belt attached to a stepper motor. The print cartridge, taken from an HP point of sale printer, is driven along the y-axis by another stepper motor belt drive. The electronic controls use an Arduino Mega to run all of the printing systems.
The design resulted in a working prototype that fulfills all of the design constraints. The rod frame carriage design is lightweight, easy to assemble and easy to integrate with the other systems. The Arduino used in the electronics has a large library of resources available to perform things like LCD, SD card, and stepper control.
Areas where future work should be focused include making molds and casting printable parts to bring down the overall cost, developing host side software, and optimizing the speed.
The documentation is being released as a thing on Thingiverse, a photo album and a video.
can you tell me the program? thanks, eddy
ReplyDelete@eddywahyu, I am not sure what you are asking but there is very detailed documentation here: http://www.thingiverse.com/thing:8542
ReplyDeleteHi, What are the greatest bottlenecks stopping it from running faster? Is it something that could be fixed with a different cartridge or faster microcontroller?
ReplyDeleteThe microcontroller can drive the head faster than it will allow and can burn out the nozzles. They can only be fired once every 800us.
ReplyDeleteThe main bottleneck right now is the stepper motors. If they are driven much faster they lose steps. The current stepper motors are very low torque and the drivers only handle 0.5amp. These two factors lead to the head only being fired about once every 8000us.